|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
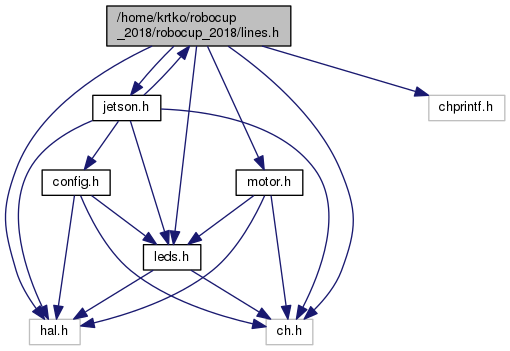
#include "hal.h"#include "ch.h"#include "chprintf.h"#include "leds.h"#include "motor.h"#include "jetson.h" Include dependency graph for lines.h: This graph shows which files directly or indirectly include this file:
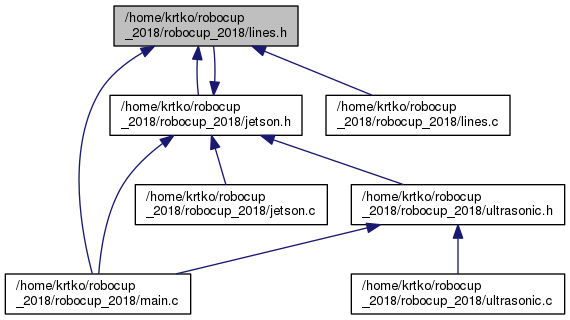
Include dependency graph for lines.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | NUMBER_OF_SENSORS 16 |
| #define | NO_LINE_DETECTED 1 |
| #define | LINE_DETECTED 2 |
| #define | LOAD_LINES_SPEEDS 3 |
| #define | LINE_CALIBRATION -1 |
| #define | LINE_REACTION_TIME 1200 |
| #define | LINE_CALIBRATION_SPEED 20 |
| #define | LINE_CALIBRATION_TIME 2000 |
| #define | INERTIA 0.95 |
| #define | PI 3.14159 |
| #define | SQRT3 1.7321 |
| #define | LINE_QUEUE 3 |
| #define | CALIBRATION 5 |
| #define | LOAD_JETSON_CALIBRATION 3 |
| #define | CALIBRATION_VALUES 23 |
| #define | JETSON_SAVE_CALIBRATION 5 |
| #define | JETSON_LOAD_CALIBRATION 6 |
| #define | LINE_SAVE_CALIBRATION 7 |
| #define | LINE_LOAD_CALIBRATION 8 |
Functions | |
| int32_t | abs_int (int32_t x) |
| int32_t | max (int32_t x, int32_t y) |
| void | calculation_of_motor_speeds (void) |
| void | determine_avoiding_direction (void) |
| void | calibrate_lines (void) |
| uint8_t | line_calibration (void) |
| void | send_line_calibration (void) |
| msg_t | check_line (void) |
| msg_t | calibration_memory (msg_t command) |
| msg_t | check_line_mailbox (void) |
| void | send_to_line_mailbox (msg_t sending_command) |
| void | line_init (void) |
Variables | |
| uint8_t | line_calibration_values_in [NUMBER_OF_SENSORS] |
| uint8_t | line_calibration_values_out [NUMBER_OF_SENSORS] |
| #define CALIBRATION 5 |
| #define CALIBRATION_VALUES 23 |
| #define INERTIA 0.95 |
| #define JETSON_LOAD_CALIBRATION 6 |
| #define JETSON_SAVE_CALIBRATION 5 |
| #define LINE_CALIBRATION -1 |
| #define LINE_CALIBRATION_SPEED 20 |
| #define LINE_CALIBRATION_TIME 2000 |
| #define LINE_DETECTED 2 |
| #define LINE_LOAD_CALIBRATION 8 |
| #define LINE_QUEUE 3 |
| #define LINE_REACTION_TIME 1200 |
| #define LINE_SAVE_CALIBRATION 7 |
| #define LOAD_JETSON_CALIBRATION 3 |
| #define LOAD_LINES_SPEEDS 3 |
| #define NO_LINE_DETECTED 1 |
| #define NUMBER_OF_SENSORS 16 |
| #define PI 3.14159 |
| #define SQRT3 1.7321 |
| int32_t abs_int | ( | int32_t | x | ) |
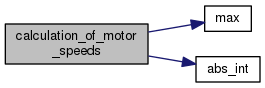
Here is the caller graph for this function:| void calculation_of_motor_speeds | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void calibrate_lines | ( | void | ) |
Here is the caller graph for this function:| msg_t calibration_memory | ( | msg_t | command | ) |
Here is the call graph for this function: Here is the caller graph for this function:| msg_t check_line | ( | void | ) |
Here is the caller graph for this function:| msg_t check_line_mailbox | ( | void | ) |
Here is the caller graph for this function:| void determine_avoiding_direction | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t line_calibration | ( | void | ) |
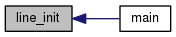
| void line_init | ( | void | ) |
Here is the caller graph for this function:| int32_t max | ( | int32_t | x, |
| int32_t | y | ||
| ) |
Here is the caller graph for this function:| void send_line_calibration | ( | void | ) |
| void send_to_line_mailbox | ( | msg_t | sending_command | ) |
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t line_calibration_values_in[NUMBER_OF_SENSORS] |
| uint8_t line_calibration_values_out[NUMBER_OF_SENSORS] |
 1.8.11
1.8.11