|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
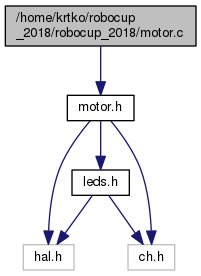
#include "motor.h" Include dependency graph for motor.c:
Include dependency graph for motor.c:Functions | |
| void | change_motors_speeds (void) |
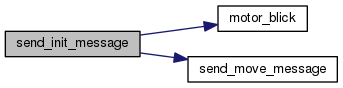
| void | send_init_message (void) |
| void | send_move_message (void) |
| void | motor_blick (int8_t motor_id) |
| uint16_t | motor_blick_interval (uint16_t ret) |
| THD_WORKING_AREA (waMotorThread, 128) | |
| THD_FUNCTION (MotorThread, arg) | |
| THD_WORKING_AREA (waMotorSaveThread, 128) | |
| THD_FUNCTION (MotorSaveThread, arg) | |
| void | motors_init (void) |
Variables | |
| thread_t * | motor_save_thread |
| int16_t | writing_motors_speeds [NUMBER_OF_MOTORS+NUMBER_OF_DRIBLERS] |
| int16_t | motors_speeds [NUMBER_OF_MOTORS] |
| int16_t | driblers_speeds [NUMBER_OF_DRIBLERS] |
| int16_t | command = MOVE_COMMAND |
| void change_motors_speeds | ( | void | ) |
Here is the caller graph for this function:| void motor_blick | ( | int8_t | motor_id | ) |
Here is the caller graph for this function:| uint16_t motor_blick_interval | ( | uint16_t | ret | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void motors_init | ( | void | ) |
Here is the caller graph for this function:| void send_init_message | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void send_move_message | ( | void | ) |
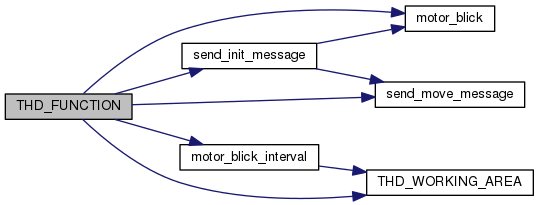
Here is the caller graph for this function:| THD_FUNCTION | ( | MotorThread | , |
| arg | |||
| ) |
Here is the call graph for this function:| THD_FUNCTION | ( | MotorSaveThread | , |
| arg | |||
| ) |
| THD_WORKING_AREA | ( | waMotorThread | , |
| 128 | |||
| ) |
Here is the caller graph for this function:| THD_WORKING_AREA | ( | waMotorSaveThread | , |
| 128 | |||
| ) |
| int16_t command = MOVE_COMMAND |
| int16_t driblers_speeds[NUMBER_OF_DRIBLERS] |
| thread_t* motor_save_thread |
| int16_t motors_speeds[NUMBER_OF_MOTORS] |
| int16_t writing_motors_speeds[NUMBER_OF_MOTORS+NUMBER_OF_DRIBLERS] |
 1.8.11
1.8.11