|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
 Include dependency graph for motor.h: This graph shows which files directly or indirectly include this file:
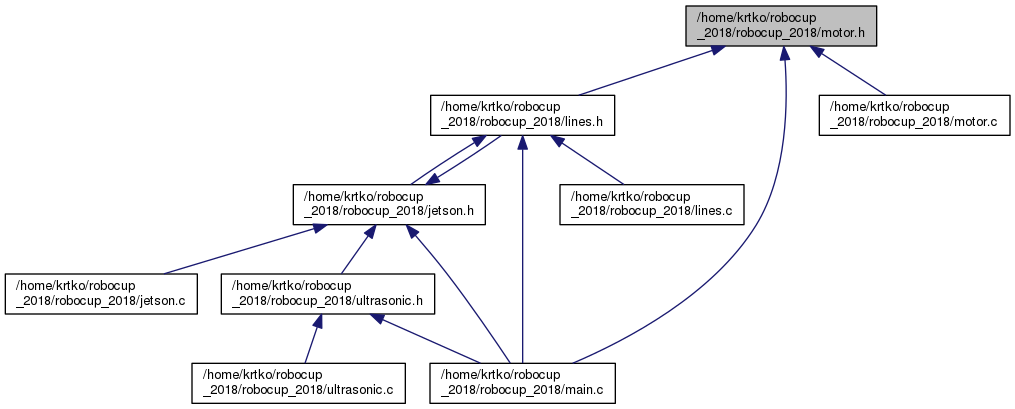
Include dependency graph for motor.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | BITS_IN_CHAR 4 |
| #define | CHARS_IN_VALUE 4 |
| #define | COMMAND_CHAR_LENGTH 4 |
| #define | SPEED_VALUE_CHAR_LENGTH 3 |
| #define | NUMBER_OF_DRIBLERS 1 |
| #define | NUMBER_OF_MOTORS 3 |
| #define | MOVE_COMMAND 32123 |
| #define | TURN_ON_MOTOR_LED 16384 |
| #define | MOTOR_BLIKING_TIME 100 |
| #define | SAVE_MOTOR_SPEEDS 1 |
| #define | LOAD_MOTOR_SPEEDS 2 |
| #define | MOTOR_SERIAL &SD2 |
Functions | |
| void | change_motors_speeds (void) |
| void | copy_speeds (void) |
| void | send_init_message (void) |
| void | send_move_message (void) |
| void | motor_blick (int8_t motor_id) |
| uint16_t | motor_blick_interval (uint16_t loop) |
| void | motors_init (void) |
Variables | |
| int16_t | motors_speeds [NUMBER_OF_MOTORS] |
| int16_t | driblers_speeds [NUMBER_OF_DRIBLERS] |
| #define BITS_IN_CHAR 4 |
| #define CHARS_IN_VALUE 4 |
| #define COMMAND_CHAR_LENGTH 4 |
| #define LOAD_MOTOR_SPEEDS 2 |
| #define MOTOR_BLIKING_TIME 100 |
| #define MOTOR_SERIAL &SD2 |
| #define MOVE_COMMAND 32123 |
| #define NUMBER_OF_DRIBLERS 1 |
| #define NUMBER_OF_MOTORS 3 |
| #define SAVE_MOTOR_SPEEDS 1 |
| #define SPEED_VALUE_CHAR_LENGTH 3 |
| #define TURN_ON_MOTOR_LED 16384 |
| void change_motors_speeds | ( | void | ) |
Here is the caller graph for this function:| void copy_speeds | ( | void | ) |
| void motor_blick | ( | int8_t | motor_id | ) |
Here is the caller graph for this function:| uint16_t motor_blick_interval | ( | uint16_t | loop | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void motors_init | ( | void | ) |
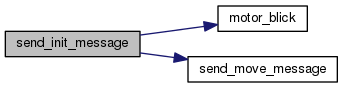
Here is the caller graph for this function:| void send_init_message | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void send_move_message | ( | void | ) |
Here is the caller graph for this function:| int16_t driblers_speeds[NUMBER_OF_DRIBLERS] |
| int16_t motors_speeds[NUMBER_OF_MOTORS] |
 1.8.11
1.8.11