|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
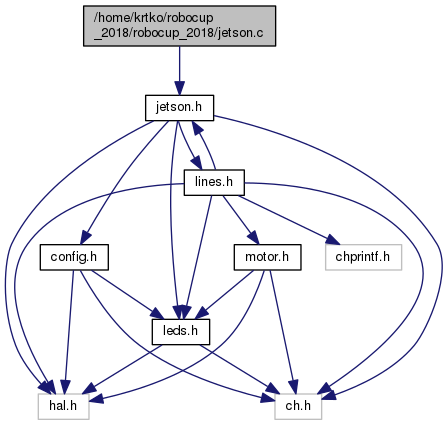
#include "jetson.h" Include dependency graph for jetson.c:
Include dependency graph for jetson.c:Functions | |
| msg_t | send_jetson (msg_t command) |
| Send message to Jetson write thread. More... | |
| static | THD_WORKING_AREA (waJetsonWriteThread, 128) |
| static | THD_FUNCTION (JetsonWriteThread, arg) |
Jetson write threadWaits for the command, which then correctly sends to Jetson. More... | |
| static | THD_WORKING_AREA (waJetsonReadThread, 128) |
| static | THD_FUNCTION (JetsonReadThread, arg) |
Jetson read threadReceives all commands from Jetson and sends them for further processing. More... | |
| msg_t | get_jetson_values (void) |
| Send message to Jetson save thread which load movement values from jetson to main variables. More... | |
| static | THD_WORKING_AREA (waJetsonSaveThread, 128) |
| static | THD_FUNCTION (JetsonSaveThread, arg) |
Jetson save threadMakes copies of movement values from Jetson read thread and makes them available from outside with function get_jetson_values. More... | |
| static | THD_WORKING_AREA (waButtonGoThread, 128) |
| static | THD_FUNCTION (ButtonGoThread, arg) |
Button go threadcheck go button on top of robot More... | |
| void | jetson_init (void) |
Init of all 3 Jetson processing threads:More... | |
Variables | |
| thread_t * | jetson_write_thread |
| thread_t * | jetson_save_thread |
| uint16_t | ball_degree |
| int16_t | robot_speed |
| int16_t | robot_azimuth |
| uint8_t | received_command |
| uint16_t | jetson_degree |
| int16_t | jetson_speed |
| int16_t | jetson_azimuth |
 1.8.11
1.8.11