|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
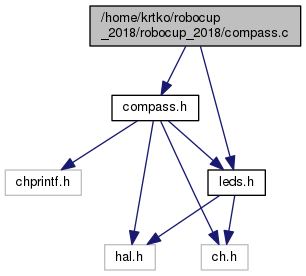
 Include dependency graph for compass.c:
Include dependency graph for compass.c:Functions | |
| THD_WORKING_AREA (waCompassCommunicationThread, 128) | |
| THD_FUNCTION (CompassCommunicationThread, arg) | |
| THD_WORKING_AREA (waCompassSaveThread, 128) | |
| THD_FUNCTION (CompassSaveThread, arg) | |
| int16_t | get_compass_degree (void) |
| void | compass_init (void) |
| void | read (uint8_t address, uint8_t length) |
| uint8_t | read_one (uint8_t address) |
| void | write (uint8_t address, uint8_t value) |
| void | write2 (uint8_t address, uint8_t value) |
| void | start (void) |
| uint8_t | start2 (void) |
| void | get_compass_values (void) |
| void | get_calibration_status (void) |
| void | get_calibration_values (void) |
| void | set_calibration_values (void) |
| void | set_calibration_values2 (void) |
| void | clean_serial (SerialDriver *SD) |
Variables | |
| thread_t * | compass_communication_thread |
| thread_t * | compass_save_thread |
| int16_t | attack_degree = 0 |
| int16_t | actual_angle = -1 |
| int16_t | final_degree = -1 |
| int8_t | sys = 0 |
| int8_t | gyro = 0 |
| int8_t | accel = 0 |
| int8_t | mag = 0 |
| uint32_t | error_count = 0 |
| int16_t | degree [3] |
| int16_t | compass_degree |
| uint8_t | calibration [22] = {252, 255, 9, 0, 26, 0, 203, 0, 84, 255, 226, 254, 1, 0, 255, 255, 255, 255, 232, 3, 142, 1} |
| uint8_t | answer [6] |
| uint8_t | response [2] |
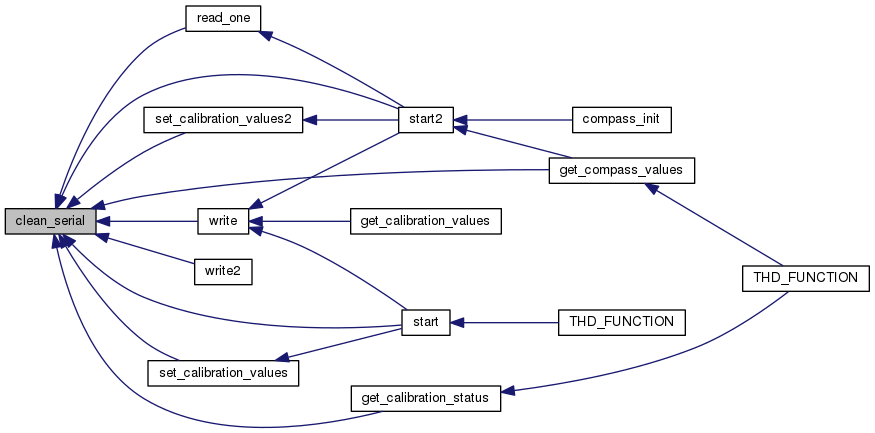
| void clean_serial | ( | SerialDriver * | SD | ) |
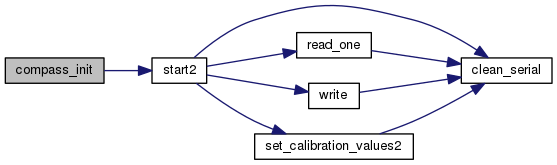
Here is the caller graph for this function:| void compass_init | ( | void | ) |
Here is the call graph for this function:| void get_calibration_status | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void get_calibration_values | ( | void | ) |
Here is the call graph for this function:| int16_t get_compass_degree | ( | void | ) |
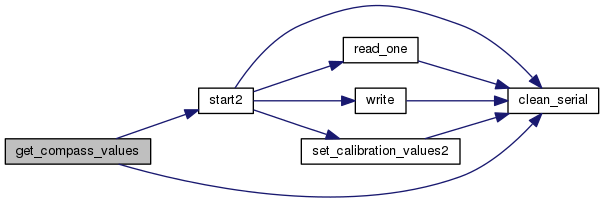
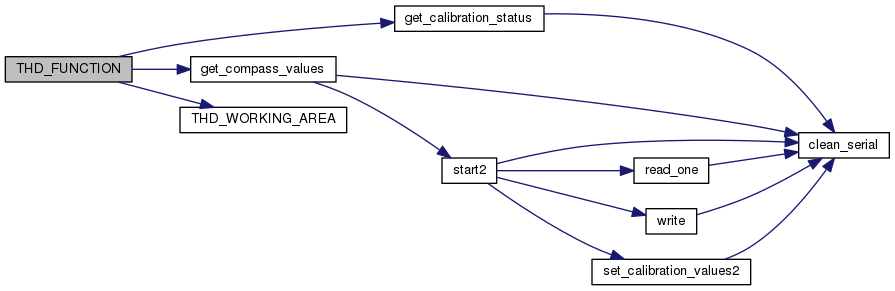
| void get_compass_values | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void read | ( | uint8_t | address, |
| uint8_t | length | ||
| ) |
| uint8_t read_one | ( | uint8_t | address | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void set_calibration_values | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| void set_calibration_values2 | ( | void | ) |
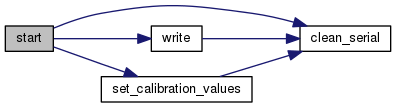
Here is the call graph for this function: Here is the caller graph for this function:| void start | ( | void | ) |
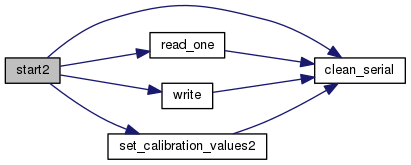
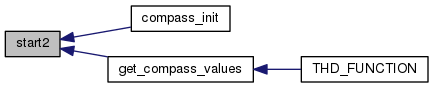
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t start2 | ( | void | ) |
Here is the call graph for this function: Here is the caller graph for this function:| THD_FUNCTION | ( | CompassCommunicationThread | , |
| arg | |||
| ) |
Here is the call graph for this function:| THD_FUNCTION | ( | CompassSaveThread | , |
| arg | |||
| ) |
| THD_WORKING_AREA | ( | waCompassCommunicationThread | , |
| 128 | |||
| ) |
Here is the caller graph for this function:| THD_WORKING_AREA | ( | waCompassSaveThread | , |
| 128 | |||
| ) |
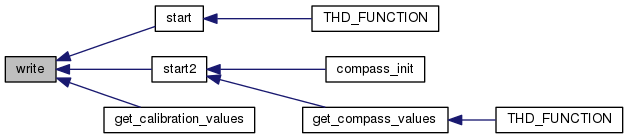
| void write | ( | uint8_t | address, |
| uint8_t | value | ||
| ) |
Here is the call graph for this function: Here is the caller graph for this function:| void write2 | ( | uint8_t | address, |
| uint8_t | value | ||
| ) |
Here is the call graph for this function:| int8_t accel = 0 |
| int16_t actual_angle = -1 |
| uint8_t answer[6] |
| int16_t attack_degree = 0 |
| uint8_t calibration[22] = {252, 255, 9, 0, 26, 0, 203, 0, 84, 255, 226, 254, 1, 0, 255, 255, 255, 255, 232, 3, 142, 1} |
| thread_t* compass_communication_thread |
| int16_t compass_degree |
| thread_t* compass_save_thread |
| int16_t degree[3] |
| uint32_t error_count = 0 |
| int16_t final_degree = -1 |
| int8_t gyro = 0 |
| int8_t mag = 0 |
| uint8_t response[2] |
| int8_t sys = 0 |
 1.8.11
1.8.11