|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
All functions, variables, threads and macros used to communicate with Jetson. More...
Macros | |
| #define | JETSON_SERIAL &SD6 |
| #define | LOAD_JETSON_VALUES 1 |
| #define | SAVE_JETSON_VALUES 2 |
| #define | JETSON_MOVE_COMMAND 255 |
| #define | KICK_COMMAND 254 |
| #define | START_COMMAND 251 |
| #define | LINE_CALIBRATION_COMMAND 250 |
| #define | INIT_COMMAND 249 |
| #define | RESET_COMMAND 248 |
| #define | DRIBLER_COMMAND 247 |
| #define | LINE_DETECTED_COMMAND 246 |
| #define | STOP_COMMAND 245 |
| #define | START_ULTRASONIC_COMMAND 244 |
| #define | STOP_ULTRASONIC_COMMAND 243 |
| #define | LEFT_TRUE 242 |
| #define | LEFT_FALSE 241 |
| #define | RIGHT_TRUE 240 |
| #define | RIGHT_FALSE 239 |
| #define | LEFT_CLOSE 238 |
| #define | RIGHT_CLOSE 237 |
| #define | START 3 |
| #define | STOP 5 |
| #define | START_STOP 6 |
| #define | DRIBLER_ON_OFF 4 |
| #define | KICK 2 |
Functions | |
| msg_t | send_jetson (msg_t command) |
| Send message to Jetson write thread. More... | |
| static | THD_WORKING_AREA (waJetsonWriteThread, 128) |
| static | THD_FUNCTION (JetsonWriteThread, arg) |
Jetson write threadWaits for the command, which then correctly sends to Jetson. More... | |
| static | THD_WORKING_AREA (waJetsonReadThread, 128) |
| static | THD_FUNCTION (JetsonReadThread, arg) |
Jetson read threadReceives all commands from Jetson and sends them for further processing. More... | |
| msg_t | get_jetson_values (void) |
| Send message to Jetson save thread which load movement values from jetson to main variables. More... | |
| static | THD_WORKING_AREA (waJetsonSaveThread, 128) |
| static | THD_FUNCTION (JetsonSaveThread, arg) |
Jetson save threadMakes copies of movement values from Jetson read thread and makes them available from outside with function get_jetson_values. More... | |
| static | THD_WORKING_AREA (waButtonGoThread, 128) |
| static | THD_FUNCTION (ButtonGoThread, arg) |
Button go threadcheck go button on top of robot More... | |
| void | jetson_init (void) |
Init of all 3 Jetson processing threads:More... | |
Variables | |
| thread_t * | jetson_write_thread |
| thread_t * | jetson_save_thread |
| uint16_t | ball_degree |
| int16_t | robot_speed |
| int16_t | robot_azimuth |
| uint8_t | received_command |
| uint16_t | jetson_degree |
| int16_t | jetson_speed |
| int16_t | jetson_azimuth |
| uint16_t | ball_degree |
| int16_t | robot_speed |
| int16_t | robot_azimuth |
All functions, variables, threads and macros used to communicate with Jetson.
3 threads communicating with Nvidia Jetson tx2 via serial communication (USART). Sends commands to other parts of program to next processing.
| #define DRIBLER_COMMAND 247 |
| #define DRIBLER_ON_OFF 4 |
| #define INIT_COMMAND 249 |
| #define JETSON_MOVE_COMMAND 255 |
| #define JETSON_SERIAL &SD6 |
| #define KICK 2 |
| #define KICK_COMMAND 254 |
| #define LEFT_CLOSE 238 |
| #define LEFT_FALSE 241 |
| #define LEFT_TRUE 242 |
| #define LINE_CALIBRATION_COMMAND 250 |
| #define LINE_DETECTED_COMMAND 246 |
| #define LOAD_JETSON_VALUES 1 |
| #define RESET_COMMAND 248 |
| #define RIGHT_CLOSE 237 |
| #define RIGHT_FALSE 239 |
| #define RIGHT_TRUE 240 |
| #define SAVE_JETSON_VALUES 2 |
| #define START 3 |
| #define START_COMMAND 251 |
| #define START_STOP 6 |
| #define START_ULTRASONIC_COMMAND 244 |
| #define STOP 5 |
| #define STOP_COMMAND 245 |
| #define STOP_ULTRASONIC_COMMAND 243 |
| msg_t get_jetson_values | ( | void | ) |
Send message to Jetson save thread which load movement values from jetson to main variables.
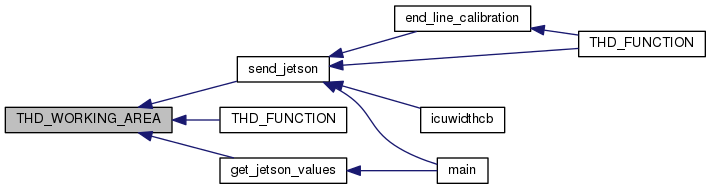
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function:| void jetson_init | ( | void | ) |
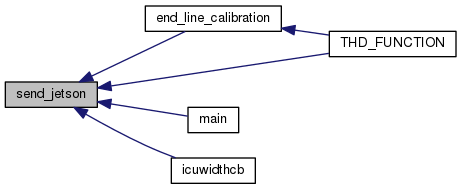
Here is the caller graph for this function:| msg_t send_jetson | ( | msg_t | command | ) |
Send message to Jetson write thread.
| command |
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
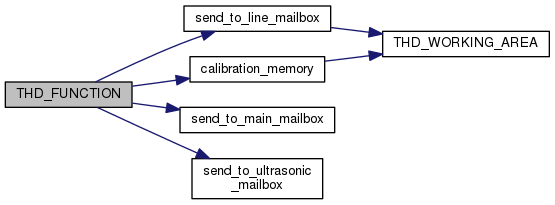
| JetsonWriteThread | |
| arg |
Here is the call graph for this function:
|
static |
| JetsonReadThread | |
| arg |
Here is the call graph for this function:
|
static |
| JetsonSaveThread | |
| arg |
Here is the call graph for this function:
|
static |
| ButtonGoThread | |
| arg |
Here is the call graph for this function:
|
static |
Here is the caller graph for this function:
|
static |
|
static |
|
static |
| uint16_t ball_degree |
| uint16_t ball_degree |
| int16_t jetson_azimuth |
| uint16_t jetson_degree |
| thread_t* jetson_save_thread |
| int16_t jetson_speed |
| thread_t* jetson_write_thread |
| uint8_t received_command |
command received from jetson
| int16_t robot_azimuth |
| int16_t robot_azimuth |
| int16_t robot_speed |
| int16_t robot_speed |
 1.8.11
1.8.11